3輪の試作について(ソフト編)
3輪を試してみたい人が、最初から先輩と同じレベルを求めて始めると挫折すると思うので、できるだけ適当にとりあえず動かしたい、という人向けの記事です。
ハード編はこちら。
まずは後輪の速度制御をしない場合です。
オムニホイールをそれぞれの動かしたい方向に対するモーターの出力は以下の通りです。
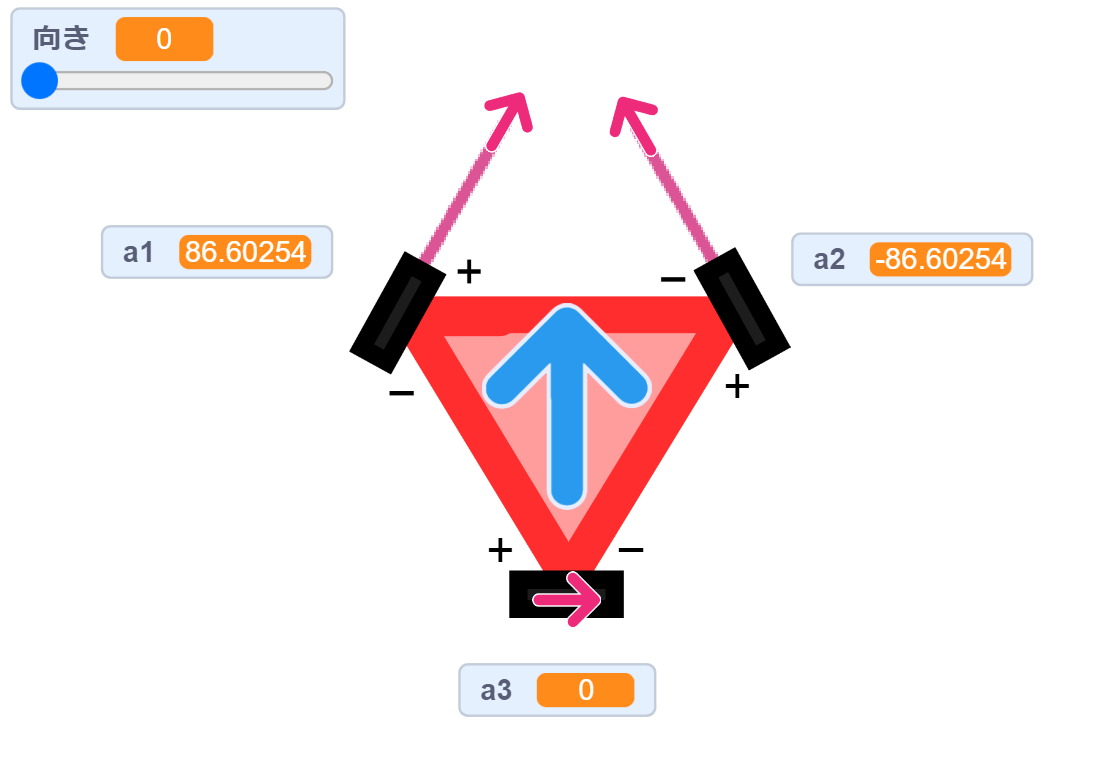


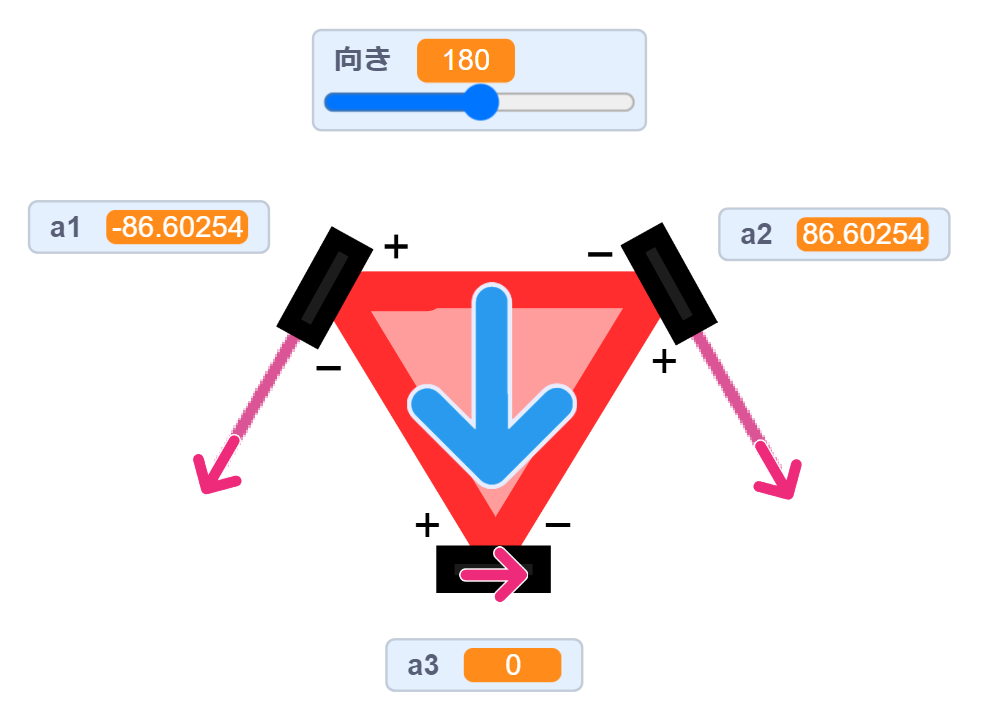
前進と後退で、値が少数になっていますが、両方100%など同じ値で大丈夫です。
横移動のとき、後輪は100%または -100%で動かすだけなので、OUTPUT制御のモータードライバを接続した場合でも、特に速度を制御する必要はありません。
あと、ロボットを回転させたい場合、後輪を停止したまま、左右のタイヤを逆回転させれば、回転させることができます。


ここまで来るのもそれなりに大変だと思いますが、まずはここまでこれば、思った方向に動かすことはできるかと思います。
あとは、①常に前を向きながら、②センサーの値によって動く方向を決めて動くプログラムを作っていきます。
試行錯誤すれば、それなりに動く3輪を作ることができます。
大会で常連が、楽に行っている(ように見える)ボールを正面にとらえる、という動きをさせるのは、思ったより難しいです。少しずつ動くようになるのは楽しいですよ。頑張ってみてください。



コメント
コメントを投稿