ダイセンμCOREで、αエクスプローラー用4輪制御アイコンを使う

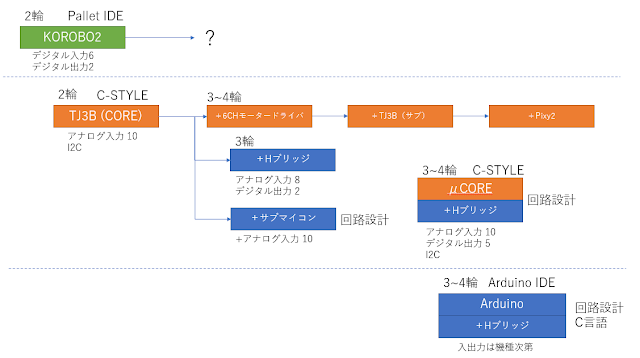
ロボカップジュニアでは、TJ3Bで有名なダイセンの製品にμCORE(マイクロコア)というものがあります。Arduinoのようにも見えますが、最大の違いはC-STYLEでプログラムが書けるということです。TJ3B用とは別の専用のC-STYLEがホームページからダウンロードできます。 TJ3Bから卒業したい、またはサイズを小さくしたい、だけどArduinoはまだ不安という選手にお勧めです。Arduinoで必要になる回路設計や配線なども経験することができます。 見た目はほぼ変わらず、モーターが標準装備ではないので、それ以外のアイコンがあります。 センサモニタが面白くて、ピンすべてが表示できます。センサのデバッグはかなりやりやすいでしょう。この見やすさだけでもμCOREを使う意味はありそうです。 また、TJ3BのオプションのI2C機器、コンパスやモータードライバーも使うことができます。 ただし、コネクタなどは何もついていないため、自分で配線をしていく必要があります。これが新しい点です。 自分でコネクタを配置できるということはサイズも大きさも自分で決められるということです。設計の自由度が大きく上がりますし、センサーを同一の基板に収めてしまうこともできます。 難しそうですが、電源さえつなげばとりあえず動きます。あとは必要な端子と端子をつないでいきましょう。 今回はこのμCOREを使って、4輪制御をしてみます。 【方法1 一番簡単な方法】 6chモータードライバ、または4chモータードライバを使ってI2Cでつなげば、TJ3Bでも使えるアイコンを使って数字で指定できるので、簡単です。 【方法2 通常の方法】 モータードライバを自前で用意し、これをArduinoのようにデジタル出力を使ってモーター制御をすることができます。モータードライバの入力に使うPinを決めて、デジタル出力に設定し、H/Lの出力をすれば、モーターを回せると思います。スピード制御なども関数を作ればできると思います。 【方法3 今回紹介する方法】 モータードライバを自前で用意し、ほぼ6chモータードライバーのような見た目で、モーターを制御します。 方法2のようにPIN単位でH/Lの制御をする必要がなく、方法1と同様の簡単さで速度も指定できるので制御がわかりやすく、かつ、方法2のように、自由にモータードライバ...