TJ3Bで三角関数を使う
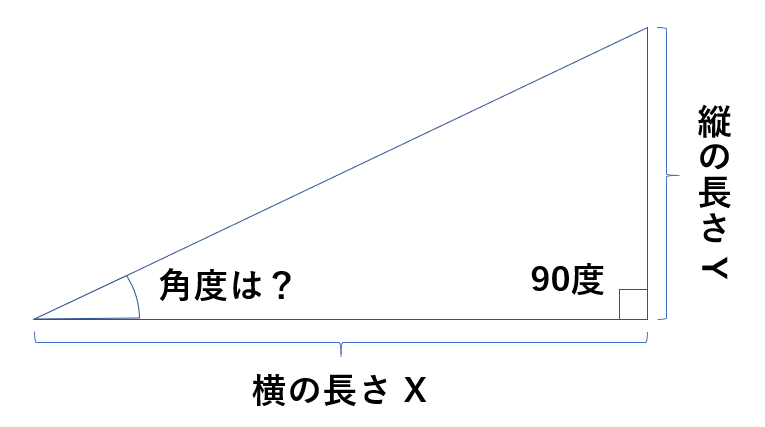
TJ3Bでの三角関数の使い方を紹介します。 先輩のポスターなどで見て、三角関数を使ってみたい、という選手向けです。 なぜ三角関数を使うかの例はこちらの記事を読んでください。 センサの値からボールのある角度を求める(理論編) おそらく、辺の長さから角度を求めたいと思います。 変数X、変数Y にそれぞれ、横の長さ、縦の長さが代入されていたとして、 C-CODEで、このように書くと使えます。 gV[VAR_B] = atan2( gV[VAR_Y] , gV[VAR_X] )/3.14*180; atan2(Y,X) という関数を使います。この行を書くだけで辺の長さから角度を求めることができます。 縦の長さのYが先に来るのに気を付けてください。 これで変数Bに角度(単位は°)が代入されます。 図にするとこんな感じです。 最後に3.14で割って、180をかけていますが、これは式で求められる角度が0~360度ではなく、単位がラジアンという0~6.28の値(半径1の円周の長さで角度を表す)を使うので変換しています。 この式が本当に正しく動くのかの検証のために、実際に値を代入して、得られる結果を実験してみました。 以下のプログラムをC-STYLEで作成しました。 先ほどの文は12行目に入っています。 C-CODE 001|//-------------------------------------------------------------------------------- 002|#include "D_Main.h" 003|#include "D_I2C.h" 004|#include "D_SIO.h" 005|#include "D_EIO.h" 006|//-------------------------------------------------------------------------------- 007|// Program Name : atna2ループ.C 008|//-------------------------------------------------------------------------------- 009|void ...